
空间分区技术
分区的目的在于对基于大区域、海量数据的地图模型进行动态显示时能很大程度上提高速度。
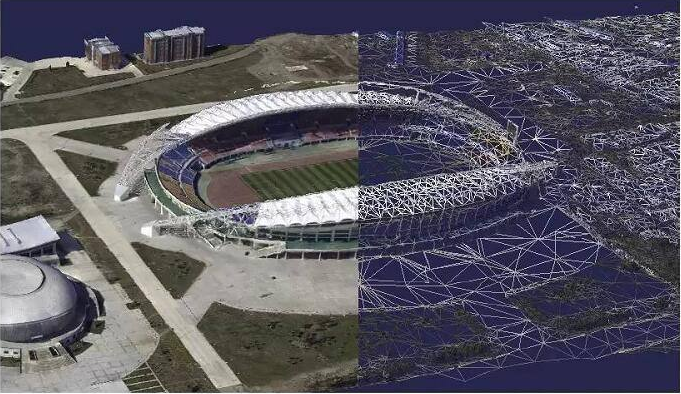
对地图模型进行分区,将各分区中的地图内容定义为众多的细节层次(高、中、低),这样三维地形图系统就可以分别采用合适的细节层来表达各个分区。在DEM的基础上,根据地图覆盖的范围和三维显示时视线的大致角度等因素将DEM分成若干个等大的子区域,然后在此基础上建立其它要素的三维模型,按照各要素与DEM子区域的相对位置将三维模型(目标)归入到相应的分区内。这样在进行动态显示时就可以根据视点的位置和视线角度来动态地装载相应的分区模型。
空间分区技术需要特别处理毗邻分区之间的过渡区域,以保证不同的分区区域持续过度,从而获得较好的地图模型的整体效果。采用的细节层次越细,过渡越自然,但另一方面,存储模型的数据量也会明显地增加,因此必须在两者之间达成一个平衡。
场景层次体系的建立
建立场景的过程中必须实现地图分区之间地形、地物的光滑连续的拼接。
- 整个三维地图场景被组织成为一个树状的结构体系
三维地图场景是这个体系中的根节点,世界空间是根节点的坐标系统,各个区域场景作为子节点都可以位于其中,并能进行定位和调节大小;可以随时加入新的节点,也可以删除某个节点。
- 所有表示场景或目标的节点中所包含的信息是相当丰富的
各类信息又是由不同类型的子节点来表达,每一类型的节点都有它自己的作用和功能,例如:几何节点用来用来存储地理目标的几何体数据(主要包括构成三维目标的三角网及其边界立方体),组节点可用来表达由若干几何体形成的复杂目标,几何变换节点用来对目标进行三维空间的平移、旋转、比例变换等,而另外用一些节点来表达三维目标的外观颜色、是否粘贴纹理、是否运用光或雾等。
- 可以对该结构树进行遍历以查询得到所需要的节点
从每个节点可以通过遍历得到其父节点,也可以得到它的众多子节点。此外,每个节点还能容纳用户定义的数据(专题属性数据),这些结构对于实现三维目标的属性查询是相当重要的。场景体系的组织是在三维地图模型建立的过程中同时进行的。